激光雷达技术入门:TOF飞行时间与相干探测的优势解析
摘要
激光雷达是重要的探测技术,应用广泛,包括空中测绘、自动驾驶等领域。激光雷达系统的一个关键设计选择是返回光脉冲的探测方式。本文回顾了两种主要方式:直接飞行时间探测和相干探测。飞行时间系统使用脉冲激光,测量光脉冲的时间延迟计算距离。相干探测将接收光与发射光的样本混合,以放大信号并抑制噪声。文中比较了两种方式的优势和权衡,包括测距范围、环境适应性、速度测量精度和成本等多方面。对于自动驾驶等近距离应用,相干探测在抗干扰、恶劣天气适应性和原生速度感知方面具有优势。但对于长距离测绘应用,高功率飞行时间系统更为可取。最佳探测方式取决于范围、环境和性能需求的平衡。
简介
激光雷达应用于自动驾驶、空中测绘、气象等领域。开发激光雷达系统时的关键设计决策是返回光脉冲的探测方式选择。主要有两种方式:直接飞行时间探测和相干探测。每种方式都有自己的优势和局限,涉及最大测距范围、环境适应性、速度测量、成本等方面。本文将回顾两种方式在激光雷达系统中的工作原理、优势和局限性,并结合相关性能指标和应用案例,提供选择最佳探测技术的指导。
飞行时间探测概述
飞行时间(TOF)激光雷达使用短脉冲激光,测量光脉冲往返目标的时间。如图1所示,系统根据发射和接收脉冲之间的时间延迟计算距离。TOF系统工作原理:
发出短时间(几纳秒)激光脉冲,启动计时器。
探测反射脉冲,停止计时器。
将距离计算为往返时间与光速的一半乘积。TOF激光雷达概念简单,可以与相对低成本的激光器和探测光学配合使用。但在最大测距范围、抗干扰性和穿透迷雾烟尘能力方面存在局限。
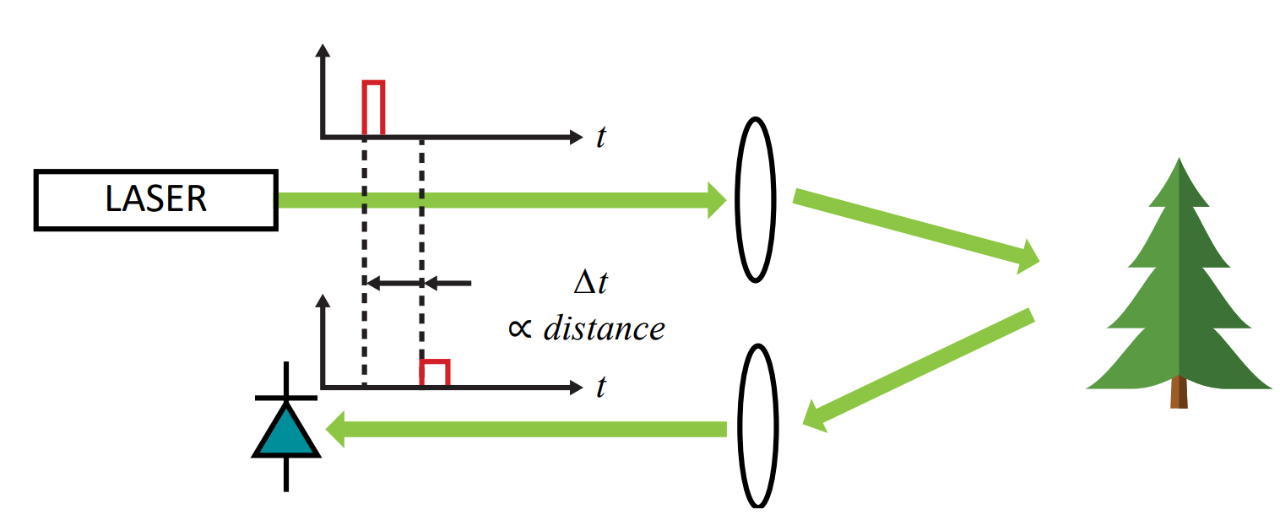
图1:飞行时间激光雷达距离测量
随距离增加,返回信号强度按平方反比衰减。要将测距范围提升一倍需要约16倍的峰值激光功率。阳光或其他激光雷达系统的干扰会对探测产生干扰。迷雾、飞雪等会导致严重的背向散射,致使TOF系统“失明”。速度信息需要处理多帧图像计算。总体来说,TOF激光雷达非常适合短中距离、干扰小的高精度距离测量应用。
相干探测概述
相干探测激光雷达将接收光与发射光的样本混合,这种技术称为异频或同频探测。相干系统使用连续调制激光而不是短脉冲。通过测量发射和接收之间的相位延迟可以计算距离和速度。相干探测的主要优点如图2所示,包括:
通过与大功率本地振荡器信号混合实现信号放大,使低传输功率下也具有出色灵敏度。
仅检测匹配波长,因此可过滤阳光等噪声,具有出色的抗干扰能力。
通过检测多普勒频移实现原生速度测量。
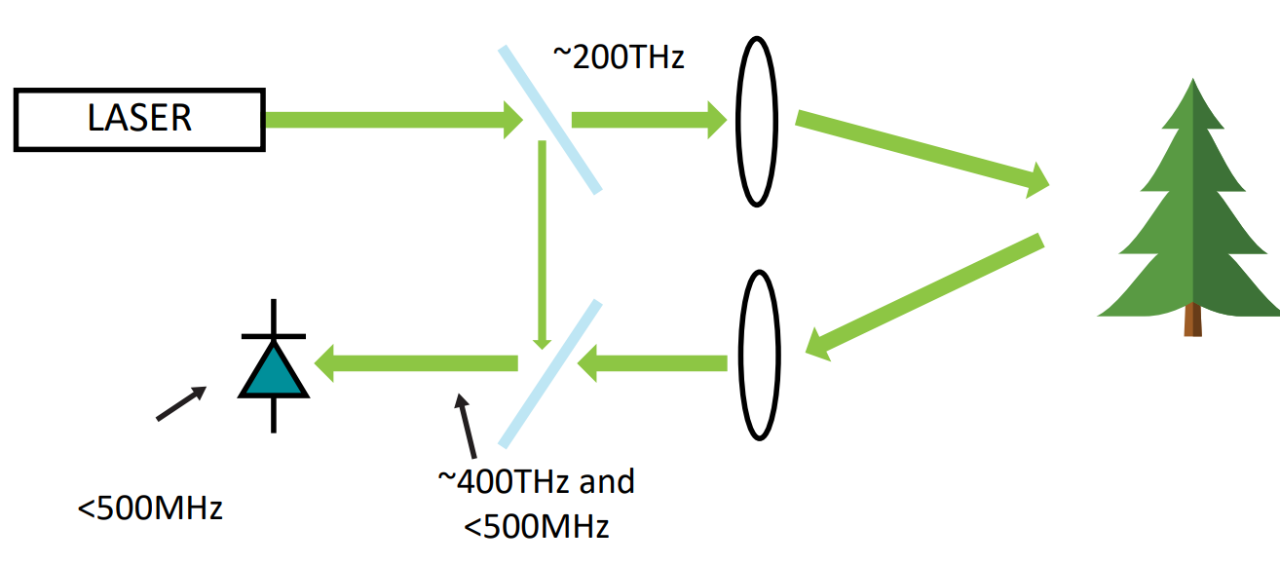
图2:相干激光雷达探测概念
这些优点的代价是复杂性增加。相干系统需要高稳定性窄线宽激光器,信号处理更复杂,通常需要傅里叶变换。但现代芯片组可帮助解决这些需求。高灵敏度和抗干扰使相干探测非常适合长距离或高噪声场景,速度数据也有助于后续感知和分类。
比较分析
从关键性能维度比较飞行时间和相干探测:
1、测距范围:TOF系统擅长中短距离,低于500米,通过高功率激光和精密光学可达1公里以上。相干探测更适合500米以上长距离,部分系统超过10公里,本地振荡器放大使其低传输功率下也具备出色灵敏度。
2、使用环境:相干探测可处理干扰和迷雾烟尘,窄带选择可过滤阳光防止饱和。TOF系统抗干扰和穿透迷雾烟尘能力较弱,需要滤波、编码及高信噪比接收器。
3、速度测量:相干激光雷达可通过多普勒频移实现原生高精度速度数据。TOF系统需要处理多帧图像以估算速度,精度较低。
4、尺寸和成本:TOF系统使用脉冲激光,相干要求低,光学部件更小更低成本。相干激光雷达需要高稳定窄线宽激光器,复杂度更高,但探测端更简单。总体成本取决于产量和性能指标。
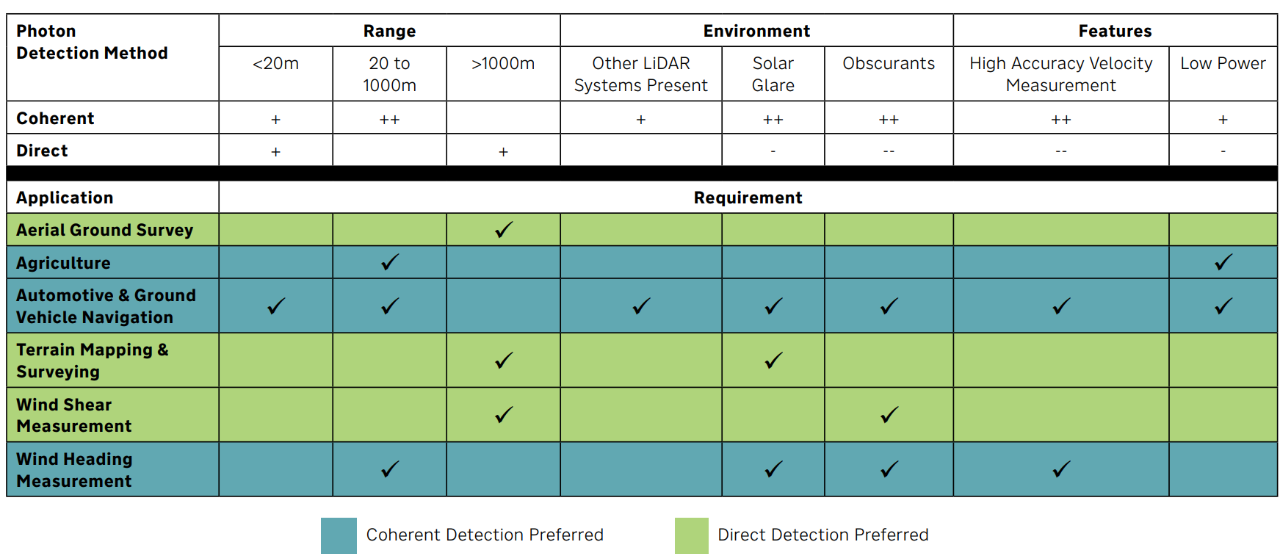
图3. 直接探测与相干探测激光雷达比较表
TOF激光雷达可提供简单的中短距离高精度距离数据,而相干探测可提供实际应用所需的抗干扰能力和原生速度输出。
应用案例
举两个例子进一步说明探测技术的权衡:
自动驾驶 - 相干激光雷达可提供抗干扰、适应恶劣天气、精准速度输出等自动驾驶所需的关键优势,200米以下的距离要求可满足。
空中测绘 - TOF系统组合了数公里的长距离测量和简单探测光学的优势,空中使用期间不太可能出现干扰。
上述案例中,最佳探测方式与距离、环境和信息需求相符,突出根据具体应用场景选择匹配的激光雷达探测方式的重要性。
使用逍遥科技的PhotoCAD设计的激光雷达案例
PhotoCAD支持光子集成电路的脚本驱动布局设计,便于快速原型设计和设计重用。OPA案例展示了构建MMI分光器树将光分割到集成加热器的阵列单元进行波束扫描。脚本放置MMI单元、在单元间路由波导、添加加热器和光栅耦合器,并连接至焊盘。关键参数如间距和阵列数量可指定。展示了PhotoCAD在分层光电集成电路布局和参数化设计方面的优势。FMCW接收器通过将接收光与发射光的样本混合提取距离和速度数据。该案例组合了可调谐激光器、光分光器、光电二极管等组件,在单元间自动布线波导。
PhotoCAD实现了对多个光子构建块的快速集成,这对复杂的相干探测系统至关重要。这些案例突显了PhotoCAD在PIC布局自动化的优势,可重复的脚本和参数化单元便于光相控阵、波束扫描系统、相干收发器等关键激光雷达组件的设计和修改。该工具灵活性强,支持多种激光雷达系统架构,促进快速原型设计和定制以满足不同的激光雷达性能需求。
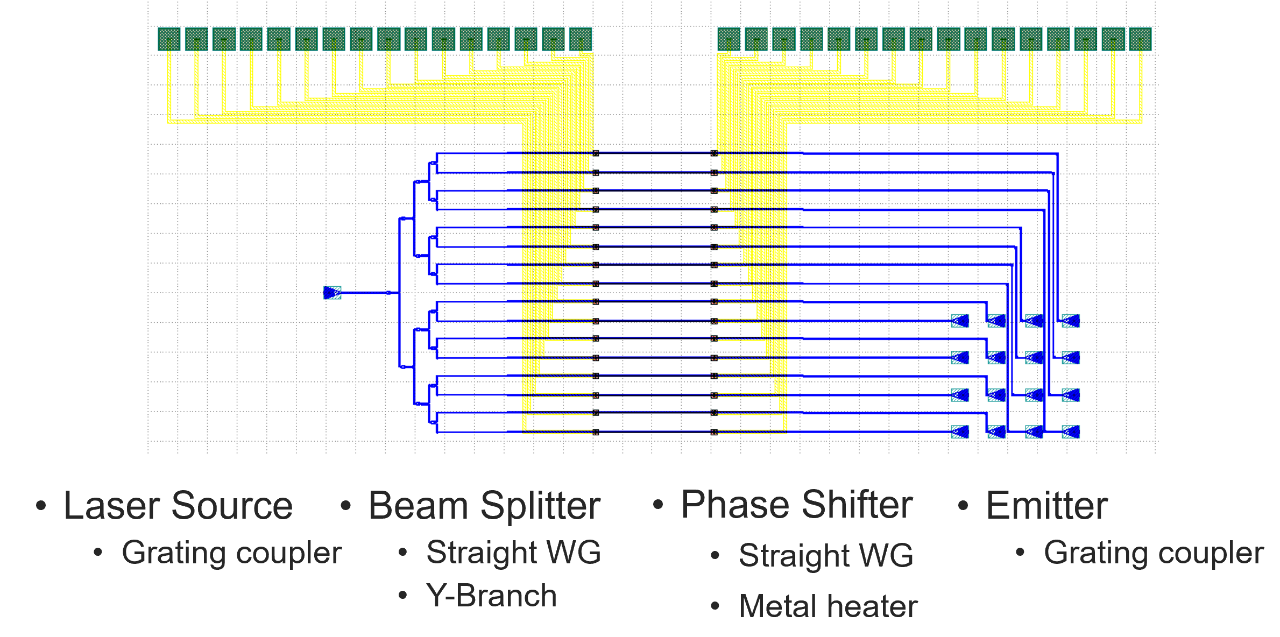
图4. 使用PhotoCAD布局工具实现的OPA
结论
根据距离范围、使用环境、精度和成本约束等要求,飞行时间和相干探测都可实现可行的激光雷达解决方案。TOF系统构建简单但抗干扰能力有限。相干探测提供抗干扰能力和原生速度输出但复杂度较大。了解这些权衡后,激光雷达设计人员可根据应用性能目标定制最佳的系统探测结构。随着激光器、光学和信号处理技术的进步,两种探测技术都将不断改进。
参考文献
https://www.embedded.com/why-coherent-lidar-is-gaining-traction-in-adas-and-automotive-sensing/
本文地址:http://www.iccsz.com//Site/CN/News/2023/12/25/20231225073051025331.htm 转载请保留文章出处
关键字:
文章标题:激光雷达技术入门:TOF飞行时间与相干探测的优势解析
2、免责声明,凡本网注明“来源:XXX(非讯石光通讯网)”的作品,均为转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。因可能存在第三方转载无法确定原网地址,若作品内容、版权争议和其它问题,请联系本网,将第一时间删除。
联系方式:讯石光通讯网新闻中心 电话:0755-82960080-168 Right
- · 哪吒汽车与禾赛合作升级,年内新车搭载 128 线激光雷达 AT128
- · Dell'Oro:2028年光学DWDM设备市场将达180亿美元
- · CES 2024激光雷达观察:国内三大龙头树立产品标杆,海外企业推进FMCW落地
- · 纠缠五重态首次在室温下实现量子相干
- · DriveNets和Acacia推出联合网络云400G ZR/ZR+解决方案
- · 一径科技ZVISION EZ6亮相2024 CES 引领SPAD激光雷达新潮流
- · 速腾聚创12月激光雷达销量超7万台 全年销量25.6万台
- · 港股市场开年第一股——速腾聚创市值超190亿港元
- · 一径科技发布全新SPAD激光雷达 LiDAR平权,进入千元时代!
- · 海创光电:满足光学技术竞争需求 助力激光雷达量产商用
- 设置首页 | 光通讯招聘 | 企业搜索库 | 广告服务 | 联系我们 | 保护私隐 | 公司介绍
Copyright ? 2009 ICCSZ.com Inc. All Rights Reserved. 讯石公司 www.iccsz.com版权所有 粤ICP备12008183号-1