中国人开发的自动驾驶激光雷达已达300线 远超世界水平
Iccsz讯 12月12日,硅谷华人创业公司Innovusion在位于硅谷Los Altos的公司发布LiDAR+相机融合方案,分辨率等效300线。该公司的CEO正是一年前离职的原百度自动驾驶事业部总监鲍君威。
了解激光雷达行业的人,会清楚300线分辨率的意义。
激光雷达(LiDAR ,Light Detection And Ranging)的工作原理是向目标发射探测信号,然后将从目标反射回来的信号与发射信号进行比较,处理后就可获得目标距离、方位、高度;如果在短时间内可以测得很多点距离信息,可进一步得到目标速度、姿态甚至形状等参数。
可以说,激光雷达传感器是自动驾驶汽车的核心部件之一。
传统的激光雷达可以按照激光线束分为1线、4线、8线、16 线、32线或64线等,多个激光线束在竖直方向沿不同角度发出,经水平方向扫描实现对目标区域三维轮廓探测。
激光线束越多,分辨率就越高,激光点云密度就越大。因此,增加扫描线的数量,保证探测距离,压缩尺寸,降低重量,是目前激光雷达的一个技术发展方向。
目前国际知名的激光雷达传感器厂商主要有Velodyne、Ibeo和Quanergy等。
今年11月,Velodyne宣布推出128线激光雷达,据称是目前前市场上所有LiDAR系统中分辨率最高、探测距离最远、视场角最宽广的LiDAR传感器。
而仅仅一个月之后,Innovusion就公布了分辨率更高的产品。
作为主传感器要达到图像级水平
为什么是300线?
12月10日,鲍君威向《汽车商业评论》解释道,高分辨率对于可靠的目标检测是必不可少的,300线才构成一幅图像。他展示了一张点云图来分析激光雷达的高分辨率对于行车安全的重要性。
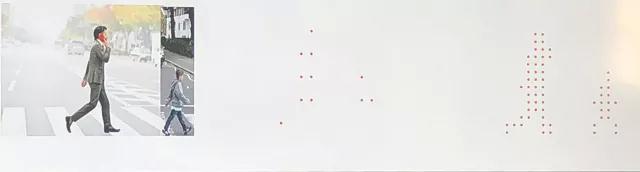
上面这张行人过马路的点云图,图中点越多,意味着激光线越多,分辨率越高。
“线和线之间是没有信号的,你看不到东西。假如路上有个砖头,或者线与线的距离越来越大你看到的东西就漏掉了,那就是事故。”鲍君威解释说。“如果一个点有1%的概率看不到,在各个点漏掉概率独立的条件下3个点都看不到的概率就是百万分之一。这个误差很高,相当于100万个场景,会有一个场景把小孩漏掉,那就是一个死亡场景。”
所以,他希望做激光雷达能够有很多的线束,达到很高的分辨率,对应更多的点,从而形成图像。

做成图像级,鲍君威认为这也正是Innovusion跟其他激光雷达公司不同之处,“横向和纵向的分辨率是一样的,没有一根根线的概念了。这是我们用精密仪器设计方法做的光学系统做出来的。”
在探测距离上,鲍君威认为,自动驾驶的激光雷达如果作为主传感器,一定要能看得比较远,至少150米。
他解释说,在高速公路上开车,时速100公里的情况下需要105米的刹车距离,这样的话,人才有足够的时间来判断前方是什么东西,然后刹车。
激光雷达要能作为自动驾驶车辆上的主传感器使用,他给出了核心的技术指标:第一,一定要能看到150米以外;第二,要人能看到人形,车能看到车形,那就要有足够的点,足够的线。

Innovusion的产品还实现了是激光雷达传感器和摄像头数据的融合,因此可以看到真正的物体颜色。“激光雷达本身没有颜色,判断不出来红绿灯,但是跟摄像头结合在一起,数据融合好的话,首先通过三维定位可以看出这是一个红绿灯的轮廓。”
简单地说,激光雷达有反射率、分辨率、距离、价钱、成本等几个核心指标。300线分辨率,而且针对10%反射率的物体检测达到150米以上,目前Innovusion已经做到了。
激光雷达价格非常昂贵,谷歌在其最早原型汽车中所使用的激光雷达传感器售价高达7万美元。不过,鲍君威称,在汽车行业量产的定义下,产品一年如果出货10万套,他有信心可以做到一套价格控制在一两千美元。
做出满足车规的产品,他给出的时间表是两到三年。
目前,Innovusion已经公布的第一版原型产品,宽5、6寸,高4寸,厚大概是3、4寸。尺寸小巧,甚至可以放到挡风玻璃上面。鲍君威希望到时在量产车上用的激光雷达传感器做成相机的形式,可以很方便放在车上多个地方。
现在无人驾驶的核心难点,鲍君威认为有两个层次,一是感知,一是决策和执行,执行是一级供应商的强项,而感知的核心难点是怎么把它可靠、经济、高效地做出来。他认为,软件、硬件,计算、传感器都是互补的,硬件的传感器做得很好的话,现有的算法就可以满足很大一部分场景的可靠性需求。
根据他的总结,无人驾驶目前的核心问题是90%的东西在感知,感知很大一部分挑战可以由传感器解决。
并非第一次创业
Innovusion成立之初就获得了高榕资本和汽车圈投资人参投的几百万美元天使轮。现在,A轮融资也已经开始。
鲍君威2014年加入百度美国研发中心,负责开发大规模数据中心硬件加速及高性能网络。2015年底加入百度自动驾驶事业部,负责车载计算系统及传感器团队,集成自动驾驶系统所需的各类传感器,并建立团队来深度评测及调研各项新型传感器技术。
正是在百度的这段工作经历让他看到了市场对于传感器的真实需求。

百度在2016年8月联合福特公司对激光雷达公司Velodyne进行了1.5亿美元的共同投资。当时投资Velodyne的项目正是由鲍君威负责技术调研。
鲍君威认为智能驾驶软件很重要的,但硬件传感器同样重要。
2016年11月,他离开百度,创立了Innovusion,开发应用于自动驾驶及其它行业的激光雷达产品及传感器融合技术。
但Innovusion并非鲍君威第一次创业。
他在光学精密测量仪器及传感器领域有近20年工作和研发经验,进入百度之前在光学测量机构有大约15年的工作经历。
鲍君威本科毕业于北京大学物理系,在加州大学柏克莱分校获电子工程硕士及博士学位。在博士期间和两位师兄共同开发了可称之为“显微光学雷达”的Scatterometry技术,1999年创立Timbre Technologies, Inc.。
第一次创业的公司在2001年被日本半导体设备公司Tokyo Electron并购,鲍君威在随后的十几年里带领Tokyo Electron在硅谷的光学测量部门将Scatterometry从原理模型变成可实际应用的精密测量设备,引领了Scatterometry技术及其它精密光学传感器在先进半导体生产制程中的广泛应用。
鲍君威的创业伙伴李义民现任Innovusion公司CTO,在精密电子及测试仪器方面有20多年的经验,曾有过知名激光雷达公司的任职经验,也是百度自动驾驶事业部传感器技术团队的负责人。
他在北京大学无线电系获得本科及博士学位,1999年赴美在美国 Argonne 国家实验室做博士后。随后在多家硅谷光通信及精密仪器公司开发技术,包括光纤激光器、超声波探测器、陀螺仪、电子显微镜及原子力显微镜等等。
2008 年至 2011 年,李义民在 Velodyne 作为工程团队核心成员研发激光雷达。2016 年初加入百度自动驾驶事业部作为传感器团队技术负责人进行各类新型传感器技术的调研。
目前,Innovusion团队有几十人,与硅谷多数高科技公司类似,其中很多人为华人背景。
本文地址:http://www.iccsz.com//Site/CN/News/2017/12/19/20171219071130133600.htm 转载请保留文章出处
关键字: 激光雷达 LiDAR
文章标题:中国人开发的自动驾驶激光雷达已达300线 远超世界水平
※我们诚邀媒体同行合作! 联系方式:讯石光通讯咨询网新闻中心 电话:0755-82960080-168 Right

- 设置首页 | 光通讯招聘 | 企业搜索库 | 广告服务 | 联系我们 | 保护私隐 | 公司介绍
Copyright ? 2009 ICCSZ.com Inc. All Rights Reserved. 讯石公司 www.iccsz.com版权所有 粤ICP备06064786