



哈工大研制出新一代仿人型假手 能敲键盘
讯石光通讯网
2009/9/15 9:12:56
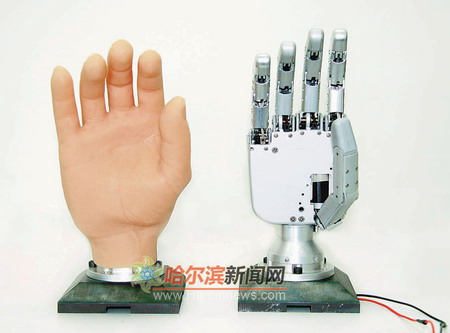
据介绍,哈工大机器人研究所课题组研制的残疾人假手样机由5个手指组成,大小与成年人手相仿,总重量约500克。整个假手由3个电机驱动,拇指和食指各由1个电机驱动,其余3个手指采用1个电机驱动。单电机驱动的新型拇指机构具有拟人的空间运动轨迹,单电机驱动的中指、无名指和小指对被抓握物体的形状具有适应性。研究成果基于机电一体化设计思想,实现了假手机构、传感、驱动和控制系统的高度集成。
据该课题负责人刘宏教授介绍,这款假手样机可以轻松实现抓、握、捏、敲等动作,可帮助手残疾人的生活实现部分自理。由于我国肢体残疾人众多,因此假手产品应用前景广泛。(刘培香 记者 姜雪松)(编辑:李建平)


新闻来源:哈尔滨新闻网